|
DIY超声波导航坦克机器人,Ultrasonic robot
关键字:机器人,超声波
作者:春波绿影
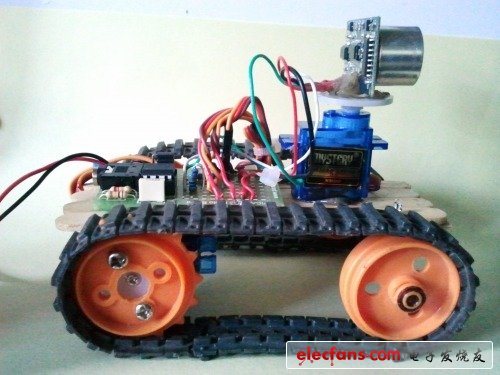
电子发烧友网讯:下面给大家介绍一个超声波导航机器人,总共花费了35美刀,为了做着玩意我用了五个小时。下面就是我用到的材料:
六个雪糕棒(有才吧)+木胶
一个老旧的坦克套装
两个改良的迷你伺服电机
需要注意的是你需要把微调筒、电位计那些东西留在电机盒子里,因为这些事被用作一个齿轮轴,同时它可以在附近的路上旋转,之后拆焊引线,用2个330欧姆的电阻替换电位计。
超声波传感器HC-SR04一个和一个用来实现平移的迷你电机
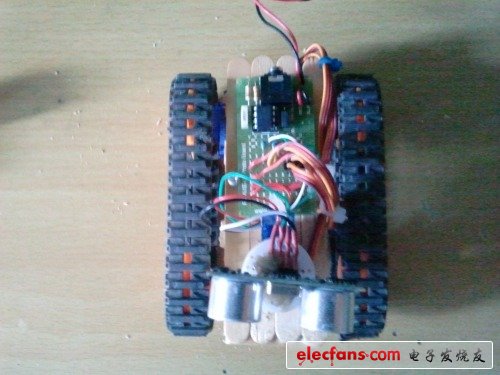
PICAXE 08M2处理器
pin0:触发HC-SR04和平移电机,同时在线上接上330欧姆电子
pin1:还不能转移到pin0
pin2:改良过的电机1和330欧姆电阻
pin3:HC-SR04
pin4:改良电机2+330欧姆电阻
供电使用外接电源,因此没有电池、
因为这是我第一个利用Pic Axe 08m2制作的机器人,因此我打算把它尽可能做小一点。
有更多的程序空间,通过程序我可以让它实现怎样的功能?请拭目以待。。。
LM2596 DC 降压可调转换器电源模块
功能:
这个高性能的DC-DC降压可调电源模块是基于熟悉的开关式稳压器LM2596制作的。
输入电压:4―30V
输入电压:1.25―30V(可调)
输出电流:额定电流2A,最大电流3A(需添加散热器)
若果输出功率高于15W,建议接上散热器
转换效率:高达92%(输入电压如果更高,转换效率则会相应提高)
工作频率:150KHZ
整流:非同步整流
模块属性:非隔离式降压模块
短路保护:电流限制,自复位
工作温度:工业级温度(- 40 ℃ to +85 ℃)(输入功率少于或等于10W)
满负载温升测试:40 ℃
电压调整:± 0.5%
负载调节:± 0.5%
动态响应速度:5% 200uS
规格:49 H x 23.5L x 12.5 W 毫米 (带有电位计)
输出波动:
输入24V,输入12V,3A 120mv(MAX)
输入12V,输出5V,3A 60mv(MAX)
以下展示手工制作的调节器“monsterlator”,所有的图片都是带有电池的情况下拍的。
或者改天我会提供一下它运行在太阳能电池下的视频,也就是一个太阳能充电池。从之前的测试看来,一切都进展顺利,虽然充电很慢,大门可以达到我想要的效果。我可能会给程序添加一个电源管理功能,到那时就可以行走30秒。休息5分钟了。
|