|
关键字:红外线障碍物探测器
这种红外线障碍物探测器不仅能用于机器人行进跟踪控制,而且还可作为家庭和商店自动控制系统的重要部分。
电路核心部分采用一只红外线发射LED(IR1)和一只红外线接收二极管(IR2)。用5V稳定直流电压对电路供电。工作时由IR1向外发射不可见的红外线短光束,经障碍物或目标反射后由IR2接收。探测到障碍物后,由扬声器LS1发出提示告警。LED1用于电源接通指示。IR1和IR2可以采用现成的集成光反射传感器CNY70,也可以用独立的IR1和IR2自行组合。
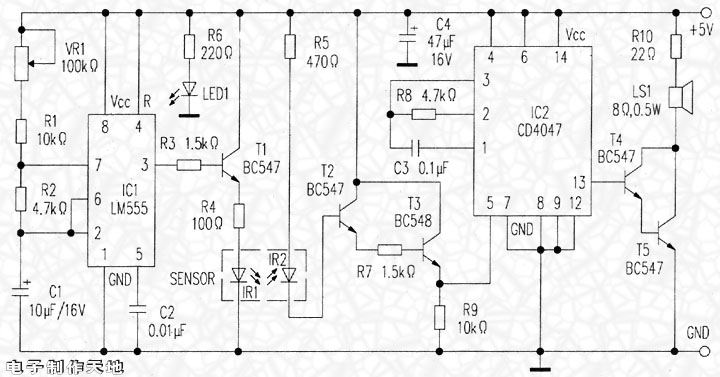
图1是探测器电路。电路中的LM555芯片(IC1)接成多谐振动器.其输出脉冲宽度可在1ms-10ms范围内用VR1、R1、R2和C1任意调节。输出脉冲由IC1③脚输出,经小功率晶体管T1缓冲后驱动红外线发射管IR1,R4用来限制IR1的输入电流。
当反射后的红外光束落到IR2上时,R5有电流流过,使T2基极获得正电压而导通,导通后又使报警驱动晶体管,T3保持正偏,直至障碍物被清除为止。
T3导通后,电路第二只多谐振荡器CD4047(IC2)由于其⑤脚变高电位而激活,振荡频率为音频可闻信号,经达林顿对管T4和T5放大后用扬声器LS1放声,R10用来限制扬声器电流。
电路如用于控制机器人的行进路线.可利用T3的高电平输出直接控制机器人内部的继电器/马达驱动电路。此电路探测障碍物的有效范围为10cm。
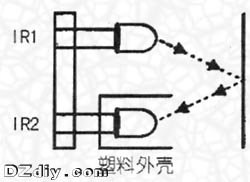
图2是IR1和IR2的安装示意图。
|