|
基于89C2051的步进电机驱动系统设计,Stepper motor drive system design based on 89c2051
关键字:可控电源,步进电机,89C2051
高低压驱动方案
图3 所示为单片机输出的步进电机相序控制信号 MA、MB、MC、MD与驱动电压Vout的时序关系。控制相序依次为:AB→BC→CD →DA→AB...。图中可见,步进电机每走一步驱动电压首先变高为Uf,然后再变低为UO,即在电机启动时刻提供高电压,力矩保持阶段提供低电压。Uf值高于UO值的目的为了使电机保持较高的动态转矩,经过T1时间后,驱动电压变成U0,以便给电机提供较低的维持转矩所需的电流。T1的值是固定的,当频率较低时T远远大于T1,此时电源输出的平均电压低,功耗也低,电机做的功低。当频率提高时,T减小,一个周期内U0电压在时间轴上所占比例减小,电源消耗的功率增大,电机做功较大,当T小于等于T1时,驱动电压为一个恒定值Uf。从而实现了低频低功耗,高频高能量供给的优化驱动模式,避免了常用驱动电路低频热耗散大的缺点。
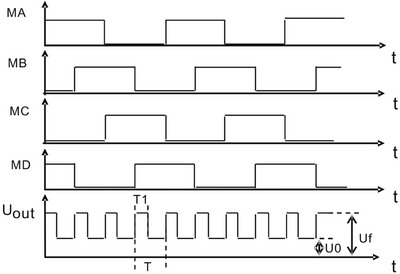
图3 相续控制信号与驱动电压关系
频率分段调整驱动电压的控制
实际应用中,将工作频率范围分成若干段,不同频率段对应不同的驱动电压值,频率越高驱动电压越大。由于步进电机绕组是感性负载,换相过程中驱动回路电流变化率越大,电机的动态响应速度越快,动态转矩越大。而电流变化率是与驱动电压成正比的。所以本控制方案大大提高了步进电机的高频转矩。
步进电机驱动控制软件
根据上述控制方案,设计了步进电机驱动程序。根据经验值预先建立了不同段频率与相应驱动电压控制码的对应关系表,并存入系统存储器。运行过程中依据当前工作频率,对应出每步周期T,再通过查表确定驱动电压控制代码,并由口P13--P10输出给可控电源,同时口P17--P14输出相序控制信号。另外,驱动电压Uf建立时间T1决定了高压输出在每步驱动中所占的比例,T1时间到,则变成维持电压U0(低压)供电,从而实现了高低压驱动。
应用情况与结果
本控制方案在XL21系列医用点滴泵中已成功应用。XL21系列原型号医用点滴泵采用工作电压为8伏的恒压驱动方案,最高流速可达820ml/hour,在流速500ml/hour以下出现整机发热现象。现型号医用点滴泵对应0-600ml/hour、600-670ml/hour、670-750ml/hour、750-800ml/hour、800-850ml/hour、850-900ml/hour、900-950ml/hour、950-1000ml/hour 8个流速段分别采用7.549V、7.868V、8.185V、8.345V、8.664V、8.981V、9.299V、9.616V共8个梯次电压驱动的方式,使整机发热得到很大缓解,同时最高流速上升到1000ml/hour。图4为原型号和现型号医用点滴泵在不同流速下的实测启动转矩对比。从图中可见,原型号泵随着设定流速的提高,输出转矩迅速衰减,而现型号泵随着设定流速的提高,由于驱动电压分段提高导致输出转矩更加平缓,使得在满足同等力矩的条件下,流速范围扩大。
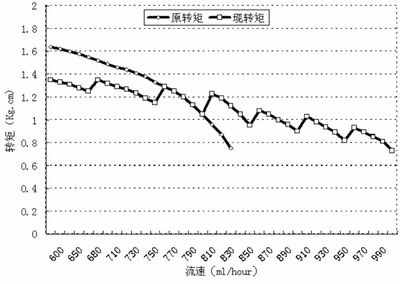
图4 两种方案启动转据对比
进电机驱动方案与恒压驱动方案相比,低速功耗明显下降,而高速力矩得到显著提升。在兼顾节能和改善步进电机矩频特性的应用中,该设计是一种性价比很好的解决方案。
参考文献
1. 王松武,常用电路模块分析与设计指导,清华大学出版社,2007
2. 张占松、蔡宣三,开关电源的原理与设计(修订版),电子工业出版社,2004(9)
3. 黄继昌,电源专用集成电路及其应用―集成电路应用丛书,人民邮电出版社,2006(6)
4. 吴红星,电机驱动与控制专用集成电路及应用,中国电力出版社,2006
|